










Американські інженери створили робота, здатного різати овочі на скибочки. Особливість підходу, обраного розробниками, полягає в тому, що спочатку робот навчався іншої задачі, яка допомогла вивчити основний навик – спочатку робот був навчений передбачати товщину скибочок, а вже після цього навчився якісно різати їх, розповідають автори статті, інформує Ukr.Media.
Маніпуляція з об’єктами – одна з основних завдань у робототехніці. Для виконання навіть простих дій з предметами робот повинен володіти безліччю навичок: вміти розпізнавати об’єкти, розраховувати оптимальне місце захоплення або іншої дії, планувати траєкторію переміщення маніпулятора і передбачати властивості об’єктів. Останній навик вкрай важливий при взаємодії з м’якими об’єктами, формою та іншими властивостями, які можуть змінюватися прямо під час взаємодії. Одне з модельних завдань, які дозволяють відпрацювати потрібні для взаємодії з різними об’єктами навички – нарізка овочів. Під час цієї, здавалося б, простої дії, робот змушений працювати з предметами, які деформуються при взаємодії з ножем, що, наприклад, призводить до зміни траєкторії нарізки і кінцевої форми скибочки.
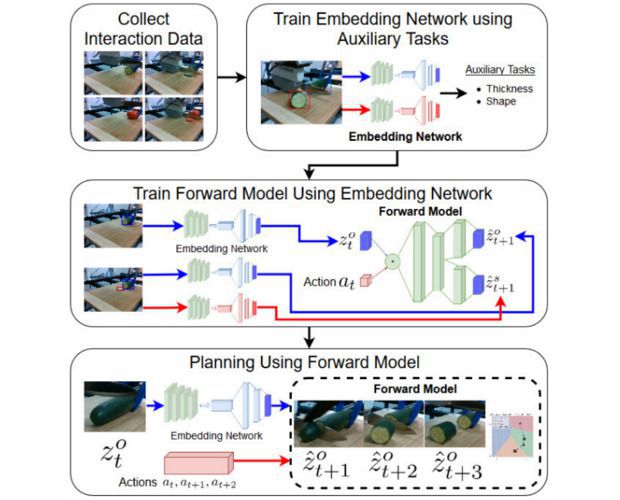
Олівер Кремер і його колеги з Університету Карнегі – Меллон обрали незвичний підхід для вирішення цієї проблеми. Спочатку вони навчили алгоритм виконання проміжної задачі – прогнозування товщини скибочки за однією двовимірною фотографією. Для цього вони створили датасет, що складається з пар зображень, зроблених до і після розрізання. Під час створення датасета інженери створювали випадковий план нарізки (кілька скибочок заданої товщини), а потім нарізали овоч і робили його знімки. Таким чином автори роботи набрали 50 демонстрацій (по кілька відрізів) для огірків і 25 для помідорів. Крім того, інженери навчили нейромережу виявляти овочі з допомогою датасета з приблизно чотирьох тисяч огірків і помідорів.
Під час навчання нейромережі для прогнозування товщини скибочки інженери навчили її переводити вихідні дані у вигляді знімка у векторне подання. Автори роботи відзначають, що це дозволило отримати навчену частину нейромережі, здатну зв’язувати знімки овочів з їх властивостями. Після навчання проміжного алгоритму розробники приступили до навчання основного. Його завдання полягає в тому, щоб скласти траєкторію руху маніпулятора з ножем. Для цього інженери скористалися методом імітаційного навчання, при якому автори руками керували рухом маніпулятора під час відрізання скибочок, а алгоритм згодом намагався відтворити аналогічні рухи як можна більш точно.
Інженери провели експерименти на роботі з камерою і двома маніпуляторами. Один з них відповідає за фіксацію овоча на дошці, а другий тримає ножа і відрізає шматочки. Під час нарізання маніпулятор рухає ніж до овоча і зупиняється під час контакту. Після цього він піднімає ніж, пересуває на розраховану заздалегідь відстань, що забезпечує потрібну товщину скибочки, і приступає до відрізу, під час якого він імітує рухи людей.
Раніше інша група американських інженерів навчила робота з маніпулятором взаємодії з овочами і фруктами для того, щоб годувати людей з вилки. Розробники навчили робота по-різному поводитися з різними типами їжі. Наприклад, оскільки шматок банана може зісковзнути з вилки, маніпулятор наколює його не вертикально, а під кутом.






